株式会社マックスネット
|
製品情報>ソフトウェア>デコンボリューション/3Dビジュアライズ | |||||||||||||||||||||||||||||
|
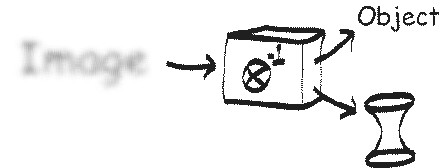
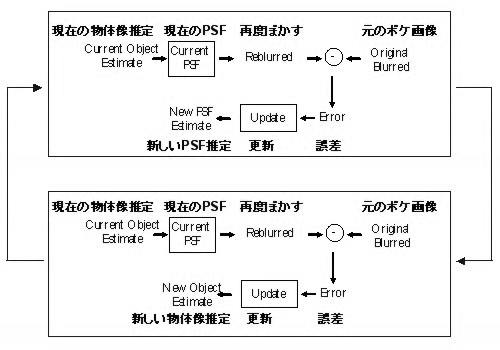
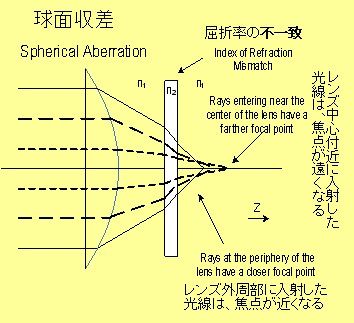
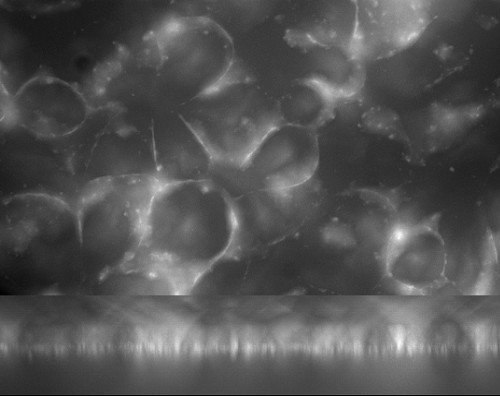
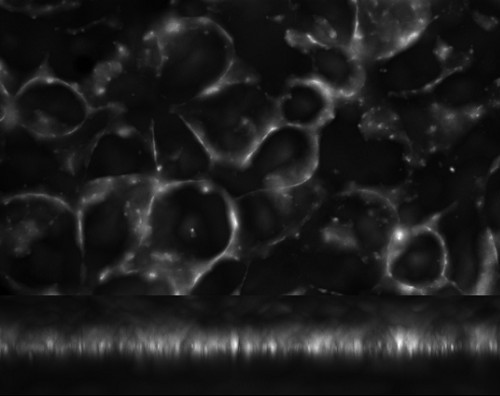
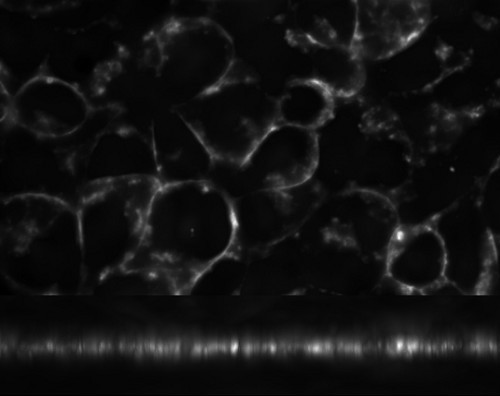
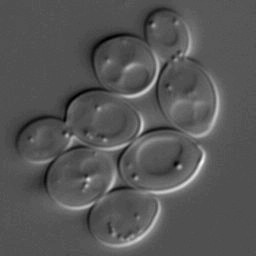
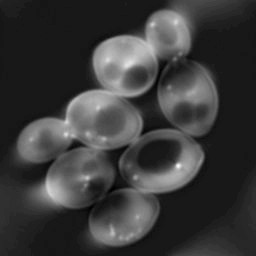
デコンボリューションとは ~その手法と特徴について~
|
||||||||||||||||||||||||||||||


Tel. 03-6800-8920 Fax 03-6730-1675

Copyright © Maxnet Co., Ltd All rights reserved.
株式会社マックスネット
|
|
製品情報>ソフトウェア>デコンボリューション/3Dビジュアライズ | |||||||||||||||||||||||||||||
|
デコンボリューションとは ~その手法と特徴について~
|
||||||||||||||||||||||||||||||
Copyright © Maxnet Co., Ltd All rights reserved.